
TM 11-7025-232-10
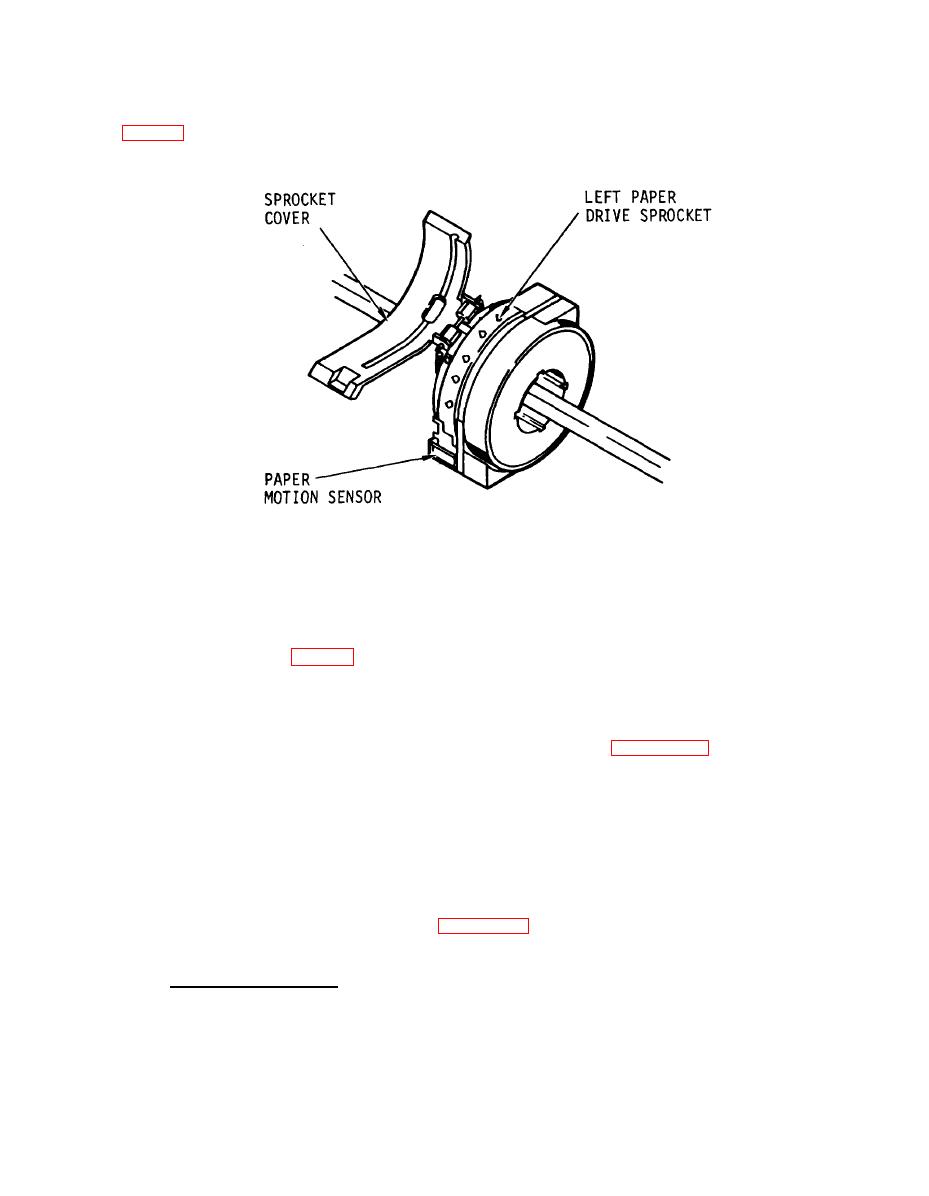
Form motion and paper supply are constantly monitored by a paper motion sensor
c o n d i t i o n and automatically take the printer off line.
The printer uses an optical tape reader and punched tape loop to control vertical
movement and produce particular print formats. Provision is made for a maximum of
12 user-programmed format channels. These format channels are located on the
punched VFU tape (fig. 1-9). Each channel is represented by a numbered vertical
column on the punched tape loop and the arrangement of the punched tape loop and
the punched holes in the vertical column determines the fixed formats. The tape
loop is representative of the paper form used by the printer and contains
s e l e c t a b l e bit positions for each line of the form. Each tape loop has 12 vertical
columns and can be made to produce up to 12 formats. F i g u r e 1-9 illustrates the
relationship between the sprocket driven tape and the lines on a representative 66
l i n e print form. Each sprocket hole on the tape represents one line of the form.
Therefore, for a standard 11 inch form with 6 lines per inch spacing, 66 sprocket
holes represent one form length of the tape.
With the exception of channel 1, t h e vertical location of punched holes in each
c h a n n e l is determined by user personnel in relation to the print format required.
The printer program automatically selects channel 1 when the TOP OF FORM switch is
actuated by the operator or when a TOP OF FORM signal code is received from the
user system. Normally, as shown in figure 1-9, top of form and bottom of form are
the first and last lines of print.
d. P r i n t e r Subsystem. The printer subsystem consists of a hammer bank which
c o n t a i n s 132 individually controlled hammer actuators. The firing of the hammer
a c t u a t o r s are controlled by the circuits on the hammer driver circuit boards.
S y n c h r o n i z a t i o n of hammer firing or start time of each individual hammer travel is
u n d e r control of the printer processor circuit board. Mechanical adjustment of
each hammer actuator determines the hammer flight time and the time required to
dampen its return motion.
1-15

